Greg Holloway is the creator of FishPi. Greg has the vision of one day having his FishPi sail across the Atlantic Ocean. It sounds like an immensely difficult project to say the least but with a little more work on the automation, FishPi will be fully equipped for that open sea expedition.

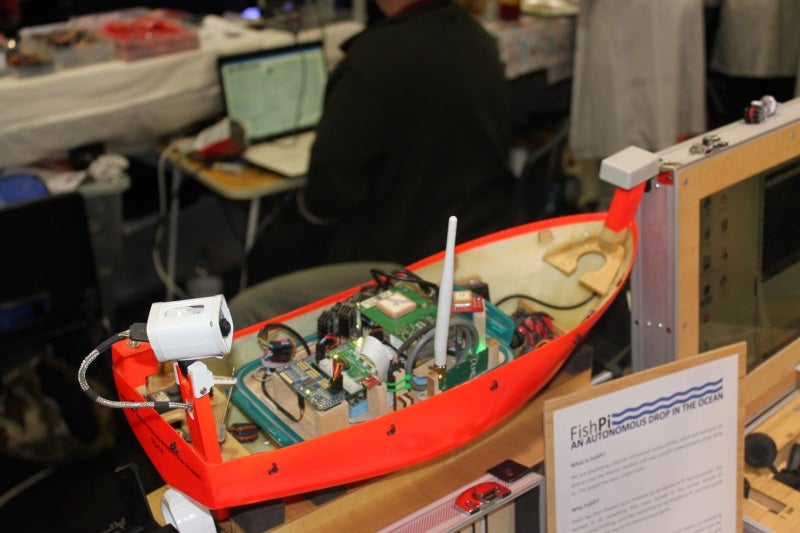
On board the Proof-Of-Concept Vehicle (POCV) is a Raspberry Pi attached to a GPS, Compass, Temperature Sensor, Adafruit’s 16 Channel PWM, a USB Webcam, and just recently a USB Wi-Fi Dongle & a RockBLOCK Satellite Communicator. All of that, with the exception of the Compass & Webcam, resides inside an upturned plastic lunchbox.
There have been similar projects of this sort, for instance, Scout’s ‘The Autonomous Transatlantic Boat’, which was initially launched as a Kickstarter: https://www.kickstarter.com/projects/601285608/scout-the-autonomous-transatlantic-boat?ref=live. The group working on this project had their vessel out at sea over the summer (2013) but have since, unfortunately, lost contact with their craft only a few weeks back. For their website, see https://gotransat.com/.
There is a commercial company called Liquid Robotics, who also have an autonomous craft. Their craft was initially powered along only by wave power. They have recently launched their latest version, which now has a small motor to drive them during the calmer moments. Their budget is considerably higher than Greg’s, with each craft costing close to $200,000 a unit. Their website is https://www.liquid-robotics.com/.
We were lucky enough to see Greg Holloway exhibiting his FishPi at Derby Mini Maker Faire in November. Naturally, we wanted to know more! How has Greg approached such a challenging project? What stage is Greg at now? What more needs to be done? We have since been in touch with Greg for more information on this project, please see below and enjoy!

Where did the idea of FishPi come from?
FishPi came from the idea of wanting to do something different. In the first few weeks and months of 2012 there was a lot of talk on the Raspberry Pi forums, and other platforms on the internet, concerning project ideas. Popular topics ranged from carputers, model cars, planes, and copters. I thought that that’s all pretty standard stuff. Not wanting to follow the herd, I set about looking for something that would be difficult, not just for the Raspberry Pi, but for myself, and what I thought that I could do.
I can’t say how exactly, but while drifting off to sleep one night I thought to myself that no one has yet said anything about a boat, not a word. Thinking more about the idea, the more enticing it became. The water has a massive advantage that you can’t really get with land based vehicles, or indeed aircraft: massive open spaces. Namely, oceans, and with the Atlantic just over the hills, it was the obvious choice. Having seen a wave or two, I knew that it wasn’t going to be easy.
*Has the POCV been tested anywhere other than the bath yet? If not, are you at the stage where you can do this?
The POCV still hasn’t gone further than the bath. Everything works, apart from automation. I could go to a lake and drive the POCV manually over Wi-Fi, with a video feed, using the Base-Station (the big silver cased PC that was on the table next to the POCV).
What has been the biggest single challenge so far?
The biggest single challenge; the software. I’m a hardware guy more used to building 4x4s and as this is my first foray into anything of this sort, I think that the idea of writing the control software, or any automation, for the FishPi project would be best suited to someone who is professionally trained and skilled at coding. The problem is finding someone who has the time to spare! Al Gray did a fantastic job of integrating all of the ancillaries and implementing manual control, but for the project to move forwards we need some automation. Maybe in the future I’ll have had some experience with the programming but for now I feel it is regrettably out of reach.
When you said that you had to start from scratch, does that include the programming or just the hardware side?
Everything from scratch: I had never used any microcontrollers, never tinkered with electronics, and never written a program above TP7 and batch files since back in the 90’s. I have played with a few motors before but nothing like what would be needed to build the FishPi. I had no knowledge of stepper motors or how servos worked beyond the hand held controllers for RC cars. There was a gap of maybe two months from when I had the initial idea for FishPi before I actually began putting things together. During that time I researched what needed to be done and how to do it.
All that I had discovered over the first year was boiled down into the article that I wrote in March on the FishPi forum: https://fishpi.org/forum/viewtopic.php?f=7&t=388.
Since then, we have been in the doldrums. I’ve been working towards raising the estimate £15,000 needed by making the LittleBox PC, and the forth coming MicroSlice Mini laser Cutter & Engraver but with the day job in the way it’s taking longer than I had hoped!
You can keep up-to-date with the developments of FishPi at https://fishpi.org/, or indeed get in touch with Greg if you feel that you could be of some assistant to this project, @TheFishPi.