Experiment 5 from the Inventors Kit for Raspberry Pi Pico, in which we explore how to control the angle of a servo with a potentiometer. Included in this resource are code downloads, a description of the experiment and also a video walk-through. This resource provides additional help and is not meant to replace the documentation that ships with the kit.
The Raspberry Pi Pico is a compact microcontroller based on the RP2040 processor – Raspberry Pi’s first in-house designed silicon. The RP2040 on the Pico uses 2 ARM processor cores, and also has 4 programmable IO controllers (PIO). These are like mini processors, and can help the Pico complete more complex tasks than it would otherwise be able to do. The Pico has 28 general purpose IO pins (GPIO), and 3 of these can also be used as Analogue inputs. The Pico can be programmed in several languages. The experiments in these resources are written in the Thonny Editor using MicroPython.
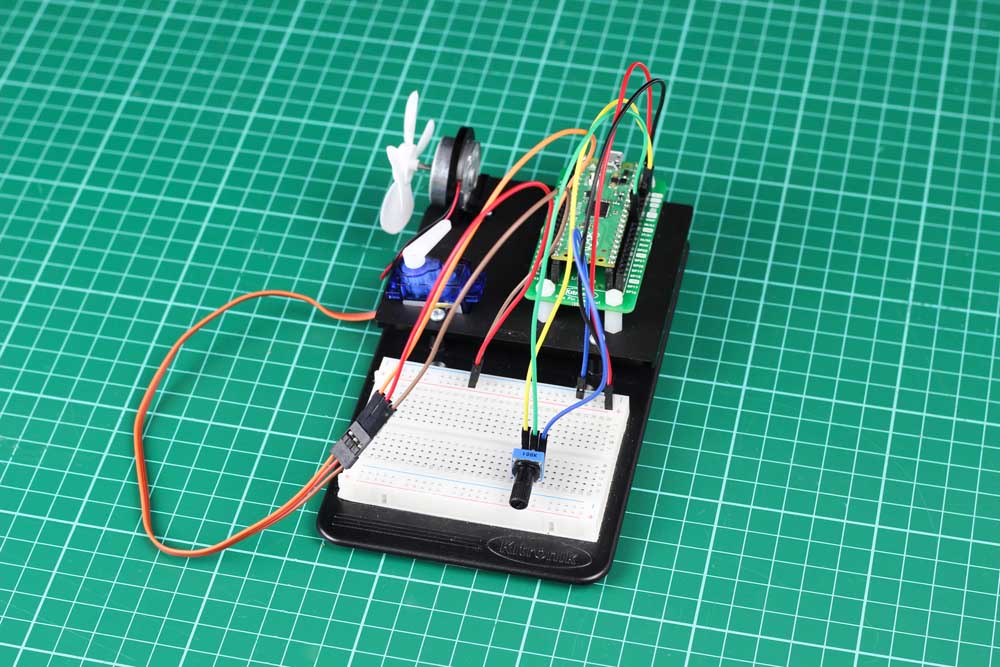
Pico Inventor’s Kit Exp’ 5 – Control a Servo with a Potentiometer
The potentiometer will be used as an input to control the position of the servo. The varying voltage generated by the potentiometer will be read using an analog input and converted into the type of signal needed to control the position (angle) of the servo.
There are different ways of controlling servos from the Pico, including making use of the Programmable IO, but the simplest method is via the PWM.
- To learn how to control a servo using a PWM output.
- To use a potentiometer to set the angle the servo moves to.
- To learn how to write a scale() function.
Video Walk-through:

Exp 5 – The Code
All experiments are coded in MicroPython in Thonny. To open in Thonny, copy and past the code below directly into the Thonny editor.
'''
Kitronik Inventor's Kit Exp 5
Control the angle of a servo from a variable resistor
We read the value of the input analog, then use the scale function to rescale it to a different range.
The input is 0 - 65535, the output is scaled from 0 to 180 degrees.
'''
import machine
import time
import math
servo = machine.PWM(machine.Pin(15)) # Setup GP15 as the pin controlling the servo with a PWM output
pot = machine.ADC(26) # Setup the analogue (A0) on GP26 with a human-readable name
servo.freq(50) # Servo pulses need to repeat every 20ms, which is a 50Hz frequency
# Convert a value proportionally from one range to another
def scale(value, fromMin, fromMax, toMin, toMax):
return toMin + ((value - fromMin) * ((toMax - toMin) / (fromMax - fromMin)))
while True:
potValue = pot.read_u16() # This variable reads the voltage that the potentiometer is adjusted to
# Convert analogue input to correct pulse width for servo control (1638 = 0.5ms & 8192 = 2.5ms, this is standard for 0 to 180 degrees)
scaledValue = scale(potValue, 0, 65535, 1638, 8192)
servo.duty_u16(math.trunc(scaledValue)) # Turn the servo to the value indicated by the potentiometer
time.sleep_ms(100)Inventors Kit Extra Resources:
Each of the ten experiments has been designed to ease you into coding and physical computing for the for the Raspberry Pi Pico. The experiments have been chosen to cover the key concepts of physical computing and they also increase in difficulty as you progress. This resource has been put together to provide additional information for this experiment and has not been designed to replace the booklet. The majority of the information you will need to perform and understand this experiment is contained in the booklet.
If you are new to coding and physical computing, even the least complex examples can be quite challenging. With this in mind, we created walk-through videos for each of the experiments. Our presenter talks you through the circuit in a way that backs up the information given in the booklet but in a style that some might find easier to absorb. As well as having a video walk-through, each page also contains the code. Although it is always good to tackle the code yourself, it can be handy for testing your circuit quickly. The code has been heavily commented as an extra learning resource. To get the most out of the experiment, once you’ve tested your circuit have a go at coding the experiment from scratch.
Follow the links in the table below:
| Exp No. | Experiment Name. |
|---|---|
| Digital Inputs & Outputs. | |
| Light Sensor & Analog Inputs. | |
| Dimming an LED using a potentiometer. | |
| Using a transistor to drive a motor. | |
| Control a servo with a potentiometer. | |
| Setting the tone with a piezo buzzer. | |
| Using a seven segment display. | |
| Exploring wind power. | |
| Capacitor charge circuit. | |
| Controlling ZIP LEDs. |